集装箱起重机在作业过程中,负荷的摆动不但会影响生产效率,而且可能引起安全事故,因此起重机一般要加装机械式或电子式的防摇装置。而电子防摇装置是一种主动防摇方式,它能将减摇和小车的运行控制结合起来考虑,不依赖于司机的操作经验。为此,防摇技术的研究得到越来越广泛的重视。对于港口码头这类室外应用场合,考虑外界的扰动往往是至关重要的,而滑模控制对被控对象的模型误差、对象参数变化及外部扰动有很好的不敏感性以及其可以用于多种线性及非线性系统,所以通过滑模控制来控制集装箱起重机的运行。
滑模控制算法
作为非线性控制的一大分支,滑模变结构控制则被认为是解决非线性系统控制的一种很有效的控制方法。滑模变结构控
制系统的滑动模态具有完全自适应功能,这是滑模控制最突出的优点。滑模变结构控制系统与常规控制系统的不同之处在于系统的“结构”可以在控制过程中,根据系统当时的状态(偏差及其各阶导数等),以跃变方式有目的地变化,迫使系统沿预定的“滑动模态”的状态轨迹运动。理论工作及控制实践证明,由于该“滑动模态”可以设计且与控制对象的参数及扰动无关,这就使得滑模变结构具有快速响应、对参数及外界干扰变化不灵敏、物理实现简单等许多优点。近年来,滑模控制理论在非线性系统控制方面得到了巨大的发展,取得了很多重要成果。基于上述特点,变结构控制已经被广泛地运用于解决复杂系统的控制问题,随着滑模变结构理论研究的进一步深入,滑模变结构控制必在诸多控制领域尤其是非线性系统的控制取得巨大的发展。当前文献所研究的大多是针对仿射型的控制对象,也就是说系统相讨于输入是线性的。线性单输入系统是滑模变结构控制对象中较为简单的一种情况,其控制方法有多种选择,而且控制器的实现也比较容易。
算法验证
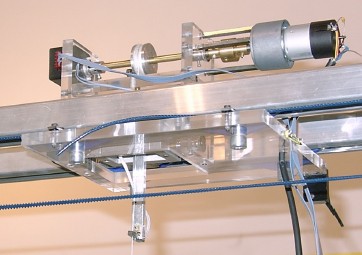
通过编写Matlab程序来进行算法验证,并且通过INTECO的3D-Crane起重机试验平台来检验算法实际效果。起重机实验平台是一个配备了独特的2D角度测量传感器单元,高非线性的多入多出系统。该系统是完全集成在Matlab/Simulink下,并且可以进行实时仿真和运行。非常适合进行算法研究、算法验证和高复杂性控制系统的设计。是起重机研发与优化的理想实验平台。


 400-878-1895
400-878-1895





